- 2026年03月16日
- 鷲岡くんと花村くんが電子情報通信学会WBS研究会で発表しました
- 2026年03月12日
- 花村くんが令和7年度学長表彰を受賞しました
- 2026年03月02日
- 岩﨑くんと内木くんが電子情報通信学会東海支部卒業研究発表会で発表しました
- 2026年02月24日
- IEICE ComEX Top Downloaded Letter Awardを受賞しました
- 2026年02月13日
- IEICE ComEXに論文が採録されました
研究紹介
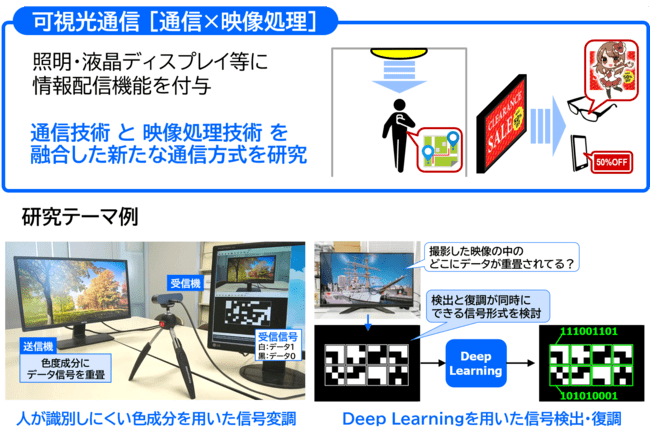
可視光を用いた無線通信技術
照明やディスプレイのLEDを送信機,室内カメラやスマートフォンカメラのイメージセンサを受信機とする可視光を用いた無線通信技術を研究開発しています.可視光通信は電波による混信がなく,指向性が鋭く通信範囲を限定できるといった利点があります.イメージセンサにより送受信機の位置特定やマルチデバイスとの通信も可能です.人の識別しにくい色成分を用いた信号変調,機械学習・Deep Learningを用いた信号検出&復調,イメージセンサのローリングシャッターを利用した高速伝送など,通信技術と映像技術を融合した研究を進めています.
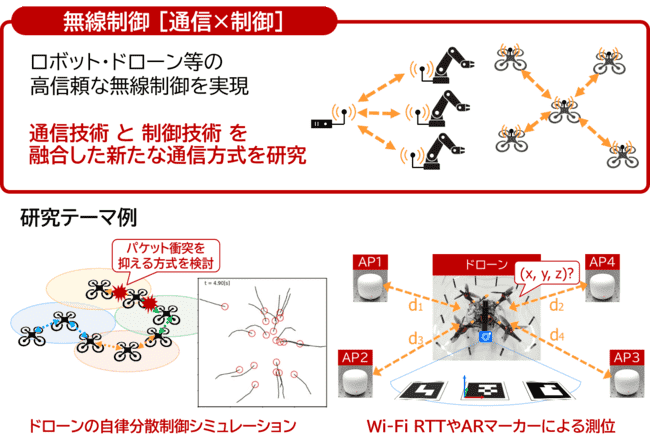
ロボット制御のための無線通信技術
ドローンやロボットの高信頼な遠隔制御を行うための無線通信技術を研究開発しています.高信頼な遠隔制御を行うためには,コントローラとロボットの間で周期的な双方向通信の必要性や時間制約があるなど,汎用の無線通信とは求められる通信のあり方が異なってきます.フィードバック制御や自律分散制御などの様々な制御目的に合わせた通信方式,ロボット開発の業界標準の一つであるROS (Robot Operating System)フレームワークやドローンのフライトコントローラと親和性の高い通信方式,Wi-Fi通信を利用した屋内測位など,通信技術と制御技術を融合した研究を進めています.