
三次元地図を活用した距離計測
概要
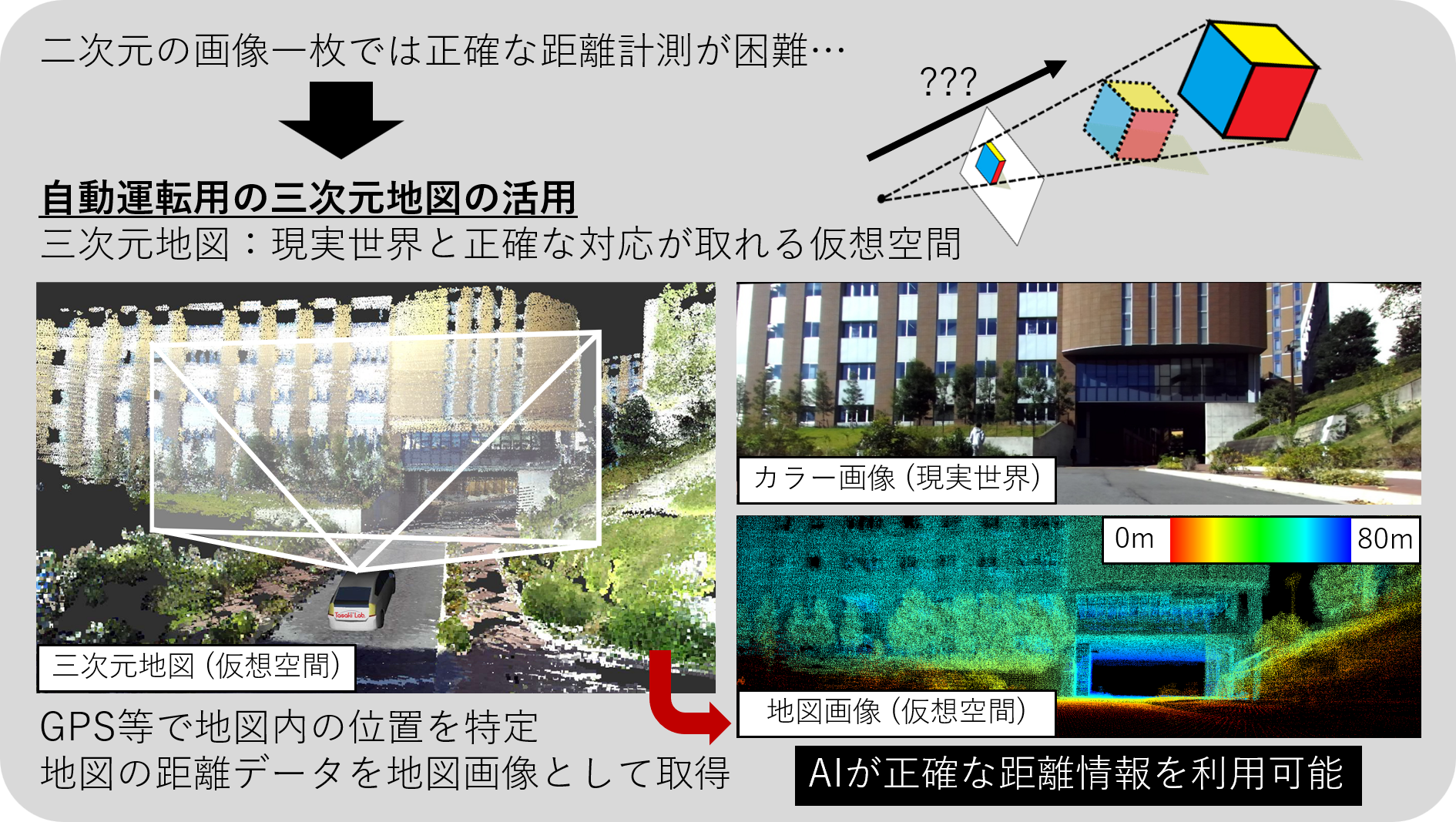
多くの自動車でカメラが搭載されるようになりました。自動運転もカメラ一つで実現できれば、一般家庭に普及しやすくなるはずです。しかし一つのカメラでは、二次元的な画像しか取得できないので、障害物までの三次元的な距離は、正確にはわかりません。距離が不正確だと障害物に衝突してしまいます。そこで正確な距離情報を持つ、自動運転用の三次元地図に着目しました。三次元地図はセンサコストを増加させずに利用できる距離情報です。三次元地図を投影して作成した「地図画像」をAIの新たな入力とすることで、三次元地図に存在しない障害物までの距離も正確に計測する研究をしています。
デモ
三次元地図を利用すれば、三次元地図に存在している建物のような静的障害物の距離を正確に計測できるのは当たり前です。本研究室では距離計測と同時に、障害物の種類(地図に存在しない自動車のような動的障害物か否か)もAIに推定させることにしました。障害物の種類を推定させることで、AIが地図に存在しない障害物も意識できるようになり、画像中の全障害物について正確な距離計測ができるようになりました。
参考文献
- Junya Shikishima, Keisuke Urasaki, Tsuyoshi Tasaki: PMOD-Net: Point-cloud-Map-based metric scale Obstacle Detection by using a monocular camera, Advanced Robotics, Vol. 37, Issue 7, pp. 458-466, Apr., 2023. [pdf][code]