
研究紹介
商業施設作業ロボットの目
家事手伝いロボットが実用化されないのを疑問に思っている人はいるでしょう。実は、ロボットは工場のような決まりきった環境でないと、物を見つける、見つけた物の位置や姿勢を把握する、つかむ場所を決める、といった人間が普通に行っていることを確実にはできません。
本研究室では、工場から一歩外へ出て、商業施設で労働力不足を補うためのロボットの開発に取り組んでいます。現在は特に「見つけた物の位置や姿勢を把握する」ことに注力し、コンビニ商品整理作業の自動化を目指しています。
商品陳列ロボット田崎研究室と株式会社東芝で共同開発したロボットは、経済産業省が主催のコンビニ商品整理ロボットの世界大会で優勝し、経済産業大臣賞を受賞しています。トップページのトロフィーは優勝時にいただいたものです。 |

|
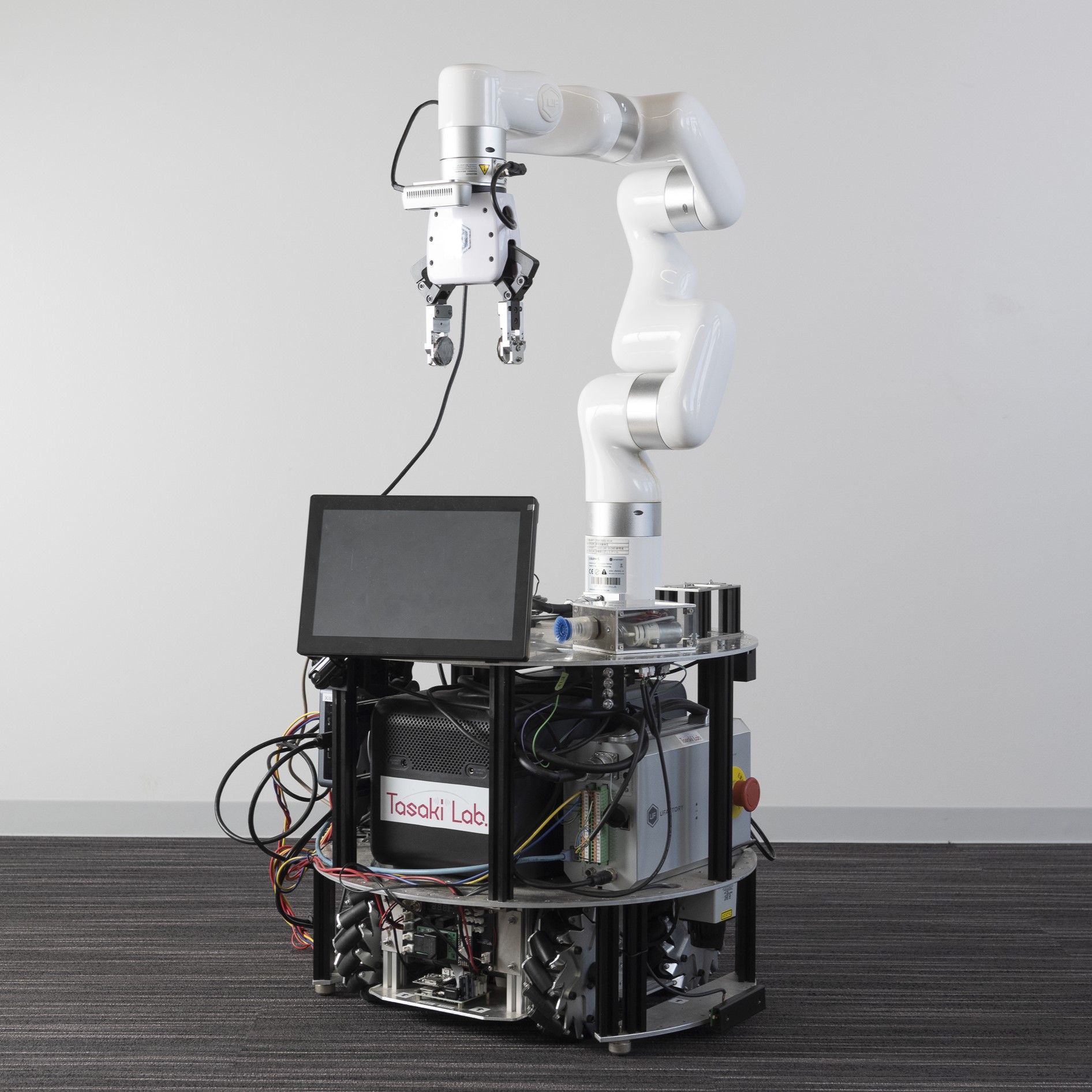
COBOTTA株式会社デンソーウェーブのCOBOTTAを改良し、赤外線で距離も測れるカメラも搭載させています。小型の物体操作に関する研究に使用しています。 |

|
二代目・商品陳列ロボット初代商品陳列ロボットより、多くの商品を整理できるように改良しました。普段の商品陳列実験や商品のデータ収集に使用しています。 |
|
自動運転車の目
私たちがカーナビを見ながら目的地へ行くように、自動運転車も自動運転用の三次元地図を使って、自分の位置を正確に把握しながら、運転します。
本研究室では、地図を目的地への経路を知るための情報としてだけではなく、周辺環境認識性能を向上させるためにも利用することで、より安全かつ普及しやすい自動運転車の開発に取り組んでいます。
自動運転検証用ロボット自動車での自動運転実験の前に、小型移動ロボットで自動運転用の地図作成や自動運転のテストを行っています。搭載しているセンサは、二つのカメラを使用して距離を測れるステレオカメラと、レーザーで距離を測れるLiDARです。 |

|
地図作成検証用ロボット一般車両に搭載されているカメラで地図の作成や更新ができることを確認するため、正しい地図との比較が必要になります。本研究室では比較用の地図を簡単に作成できるように、計測範囲が広いLiDARを上部に搭載したロボットを使用しています。 |

|
名城大学三次元地図三次元地図を活用した研究を促進するため、名城大学の三次元地図を作成しました。三次元地図を自由な視点で楽しみたい方は右のアニメーションをクリックしてみて下さい。 |

|