世の中で活躍するロボットを産み出していくためには,ロボット単体での賢さを追求していくことはもちろんですが,それと並行してロボットを導入するためにどうしたら?という課題に答えていく必要があると考えています.
この課題に対するアプローチとして,当研究室では,ロボットと周辺の環境やサービスを受ける人まで含めたトータルなシステム開発を進めることが重要と考えています.
この観点から,当研究室ではロボットとロボット外の物理的,情報的なインタフェースを整備していくことに主眼をおいて,ロボットの要素技術から要素を統合するシステムインテグレーションの研究まで幅広く行っています.
2025年度は,ハードセンシンググループとサービスロボットグループの2つのグループで活動をしています.
ハードセンシンググループでは,ロボット技術およびロボット技術を活用したハードウェア要素技術,画像処理技術について研究を行っています.
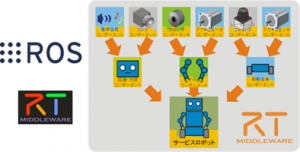
サービスロボットグループでは,サービスロボットの活用を目指し,特にロボットミドルウェアを活用したシステムインテグレーションを支援する技術の研究開発を進めています.
研究成果の発表の場としては,学会発表だけではなく,WRS FCSC(World Robot Summit Future Convenience Store Challenge)などのロボコンへの参加も行っています.
ハードウェアセンシンググループ
知能化空間を構築可能なデバイス
|
可変機構を有するマルチコプタ
|
| 照明やスピーカなどを搭載し,簡単にカスタマイズできるパネル型RTデバイスを開発しています.ブロックのようにデバイスを組み替えることで,自分にあった作業空間や生活空間を構築できます. | インフラ点検の自動化を目指して,可変機構を搭載したマルチコプタの開発をしています.機体設計からシステム構築までを全て独自で設計・開発しています. |
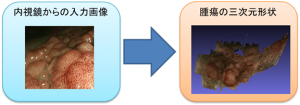
内視鏡画像における腫瘍の三次元復元
|
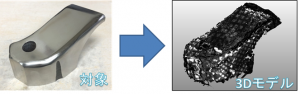
鏡面反射する金型の三次元計測
|
| 画像処理を用いた医療支援技術を開発しています.内視鏡画像から腫瘍の三次元形状を復元し,腫瘍を可視化することで医療分野での貢献を目指しています. | 鏡面反射する物体は3Dスキャナではデータの抜け落ちが発生し,正確な計測が困難です.そこで,ステレオカメラを用いてデータを補完することで,正確な三次元計測を可能にしています. |


サービスロボットグループ
ミドルウェアを用いたロボットシステム開発
|
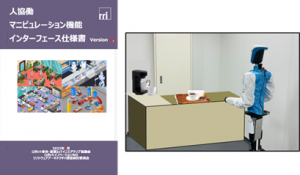
ソフトウェアアーキテクチャの仕様化・標準化
|
| サービスロボットにはCommunication・Navigation・Vison・Manipulationなど多くのシステム構成要素があります.そこで,必要な要素をモジュールごとに作成して組み合わせたり,既存のモジュールを有効に再活用するためにロボットミドルウェアを用いたシステム開発を行っています. | ロボットシステムの開発には,時間やコストが多くかかります.そこで,標準仕様をもとに様々なロボットへ移植可能なロボットシステムの開発を目指して,ソフトウェアアーキテクチャの仕様化・標準化および仕様に基づいた実装事例の開発に取り組んでいます. |
異種ロボットに適応可能なAI・ロボットシステム統合フレームワーク
|
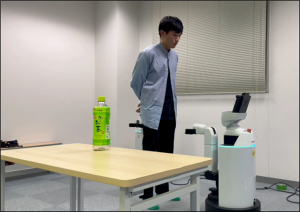
音声対話を用いたサービスロボットへの動作指示
|
| ロボットに複雑な作業をさせるには,人工知能・機械学習の導入が必要になります.そこで,異なる種類のロボットに適応可能なAI・ロボットシステム統合フレームワークを開発し,より簡単な人工知能の導入を目指しています. | ロボットとの対話や作業指示の対応範囲が広くないことが挙げられています.そこで,大規模言語モデルを活用して,より柔軟にロボットに対話を通じて作業指示することを可能にしています. |
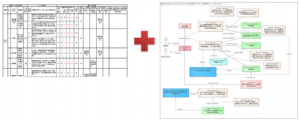
サービスロボットの保護方策
|
|
| 人手を解消するようなロボットは人間と共存して作業を行うため安全の確保が必要になります.そこで,リスク項目を整理するシートとリスクの流れを可視化するツールを統合して,誰もが安全に利用できる保護方策の策定を目指しています. | |