
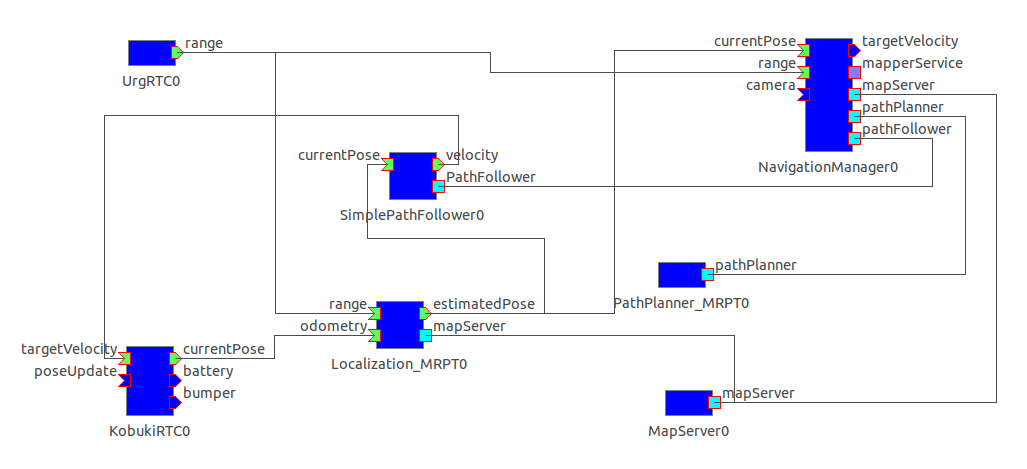
MobileRobotNavigationFrameworkの提供するRTコンポーネント群では,地図生成だけではなく,生成した地図を用いた経路追従のためのRTコンポーネントを提供している.ここで用いるRTコンポーネント群の全体概要を下図に示す.
上記のシステムでは,以下のような特徴を持つ.
- URG等のレーザレンジファインダ
- 移動ロボットの移動情報(オドメトリ)とレーザースキャナから取り込んだ情報をマップとマッチングさせることで高度な自己位置推定を可能
- 読み込んだマップ情報から軌道計画
- 軌道計画した軌道への追従