
環境地図生成のために用いるRTコンポーネントのコンパイル手順について示す.なお,公開されているRTコンポーネントを再利用する場合の利用までの基本的な流れは以下の通りである.
- cmakeが成功し,makefileが生成されたらmakeを実行し,RTコンポーネントの実行ファイルを生成
- buildディレクトリ内でcmakeを実行
- ダウンロードしてきたソースコード内にビルド用スペースとしてbuildディレクトリを作成
- ネット上(GitHubなど)からRTコンポーネントのソースコードをダウンロードしてくる
移動ロボット制御用RTコンポーネントのコンパイル
TEC-1を利用する場合
TEC-1を利用する場合は,SpurRTCを用いる.以下にSpurRTCのコンパイル方法について示す.なお,TEC-1を利用するためには事前にYP-Spurをインストールしている必要があるので注意すること.
最初に,TEC-1用のパラメータファイルをダウンロードする.
$cd $cd workspace $git clone https://github.com/rsdlab/tec-1-param |
続いて,TEC-1を動作させるためのRTコンポーネントである,SpurRTCをダウンロードし,コンパイルを行う.
$cd $cd workspace $git clone https://github.com/rsdlab/SpurRTC $cd SpurRTC $mkdir build $cd build $cmake .. $make |
Kobukiを利用する場合
Kobukuを利用する場合は,kobuki_rtcを用いる.
$git clone https://github.com/rsdlab/kobuki_rtc |
しかしながら,kobuki_rtcをコンパイルするためには,libkobukiが必要となる.libkobukiは以下のサイトから入手可能である.今回は,libkobuki-1.0.3.zipをダウンロードしてください.
libkobukiダウンロードページ
ただし,libkobukiはKobuki購入者のみダウンロード可能であるため,指示に従ってダウンロードしてください.なお,ダウンロードしたパッケージに含まれるインストーラでは,OpenRTM-aistのバージョンの違いからインストールができないため,ソースコードからコンパイルし,インストールする必要がある.詳しくは「libkobukiのインストール方法」を参照すること.
libkobukiインストール方法
$cd $cd workspace/kobuki_rtc $mkdir build $cd build $cmake .. $make |
レーザレンジファインダ用RTコンポーネントのコンパイル
北陽電機製レーザレンジファインダURG用のRTコンポーネントのコンパイルを行う.以下の手順に従いコンパイルを行う. なお,途中でダウンロードしているurglibはUrgRTCのコンパイルのために必要なためダウンロードを行っている.
$cd $cd workspace $git clone https://github.com/rsdlab/UrgRTC $cd UrgRTC $git clone https://github.com/rsdlab/urglib $mkdir build $cd build $cmake .. $make |
ジョイスティック用RTコンポーネントのコンパイル
ジョイスティック用RTコンポーネントであるSFMLJoystickのコンパイルを以下の手順に従い行う.
$cd $cd workspace $git clone https://github.com/rsdlab/SFMLJoystick $cd SFMLJoystick $mkdir build $cd build $cmake .. $make |
ジョイスティック入力から速度へ変換するRTコンポーネントのコンパイル
ジョイスティック入力から速度へ変換するRTコンポーネントであるSFMLJoystickToVelocityを以下の手順に従いコンパイルを行う.
$cd $cd workspace $git clone https://github.com/sugarsweetrobotics/SFMLJoystickToVelocity $cd SFMLJoystickToVelocity $mkdir build $cd build $cmake .. $make |
地図生成用RTコンポーネントのコンパイル
地図生成用RTコンポーネントであるMapper_MRPTを以下の手順に従いコンパイルを行う.
$cd $cd workspace $git clone https://github.com/rsdlab/Mapper_MRPT $cd Mapper_MRPT $mkdir build $cd build $cmake .. $make |
地図管理マネージャの環境構築
地図管理マネージャであるNavigationManagerを以下の手順に従いコンパイルを行う.
$cd $cd workspace $git clone https://github.com/sugarsweetrobotics/NavigationManager |
NavigationManagerはJavaのRTコンポーネントであるため,Eclipse上でコンパイルを行う必要がある.以下にコンパイルの手順を示す.
- Eclipseを起動する
- メニューバーの「ウィンドウ」→「パースペクティブを開く」→「Java」を選択
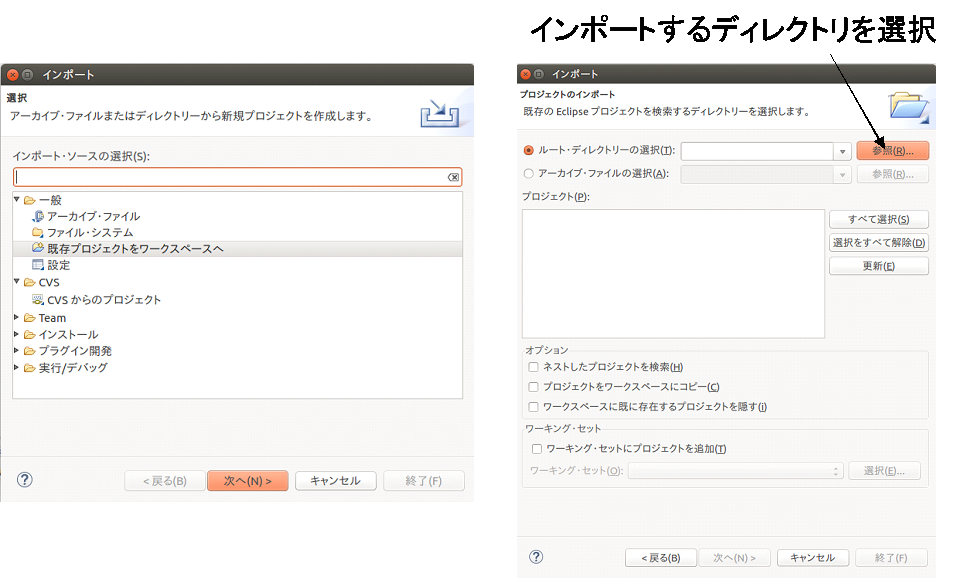
(すでにJava用の開発環境が開かれている場合は,表示されないので注意.ウィンドウ右上にJavaと出ている場合は,この手順はスキップ) - メニューバーの「ファイル」→「インポート」を選択し,「一般」→「既存プロジェクトをワークスペースへ」を選択.下図を参考に,ダウンロードしたNavigationManagerのディレクトリを選択する
- MapperViewer.shの中を編集する
- パッケージ・エクスプローラーに表示されるbuild_NavigationManager.xmlを開き,以下を編集
8行目
【修正前】
export CLASSPATH=.:${RTM_JAVA_ROOT}/jar/OpenRTM-aist-1.1.0.jar:${RTM_JAVA_ROOT}/jar/commons-cli-1.1.jar
【修正後】
export CLASSPATH=.:${RTM_JAVA_ROOT}/jar/OpenRTM-aist-1.1.2.jar:${RTM_JAVA_ROOT}/jar/commons-cli-1.1.jar
10行目
【修正前】
java MapperViewerComp -f rtc.conf $*
【修正後】
java NavigationManagerComp -f rtc.conf $*
19行目
【修正前】
exec executable=”${java.home}/../jdk1.7.0_17/bin/idlj”
【修正後】
exec executable=”${java.home}/../bin/idlj”
build_NavigationManager.xmlを右クリック→「実行」→「Antビルド」を行うと,ビルドが成功する.
その後,パッケージ・エクスプローラー上のNavigationManagaerを右クリック→「更新」を行う.
前へ 一覧へ戻る 次へ